
It’s time for my EV trip planning app trippler to cater to multiple destinations, beyond the beaten track of simple A-to-B trips. This is another feature I decided I needed when planning and driving The Cross to The Cape.
Multiple changes
I’ve wanted multiple destinations for some time, but recent refactoring of the UI and planning constraints reduced the barrier to getting started. Nonetheless, the change touched many parts of the app that assumed trips were A to B.
Multiple destination UI
The UI still leads with A to B, but now provides a basic extension for adding multiple waypoints, which can also be used to create return trips, like the whole long weekend plan for The Carnival of the Carve.

Routing
Openrouteservice routing already supports waypoints. In fact, I’d been passing an empty list of waypoints to my routing function since its inception!
Charger selection magic
The bulk of the work was done here. The logic and data preparation to represent chargers along a route previously assumed that the route would only pass by a charger once. However, with side branches, we might pass individual chargers multiple times and, with a return trip, we’d pass most if not all chargers twice.
While some edge-cases remain, generally charger data preparation could be cleanly extended by splitting into two passes:
- Find all chargers in the whole route corridor and apply selection logic, to get the set of unique chargers for planning, then
- Map unique chargers to each segment of the route in travel order.
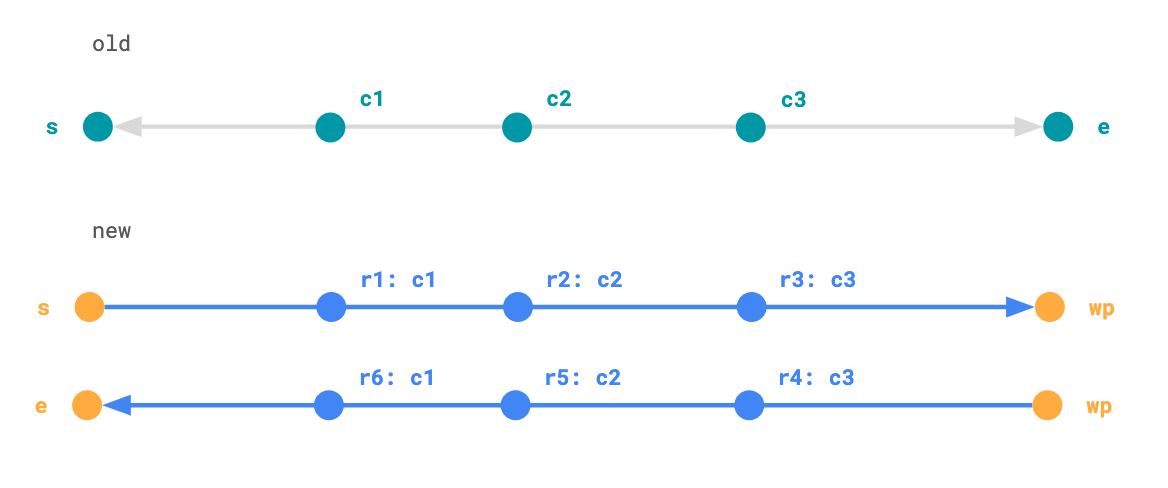
Matrix reloaded
The matrix of distances is a key input to the planning solver. Previously comprising just start and end points and unique chargers, it’s now updated to include all waypoints and each appearance of chargers per segment.
New constraints
We add just a few new planning constraints by leveraging most of our old constraints with the reloaded matrix:
- Must stop but can’t charge at all waypoints
- Minimum SOC can be defined per waypoint
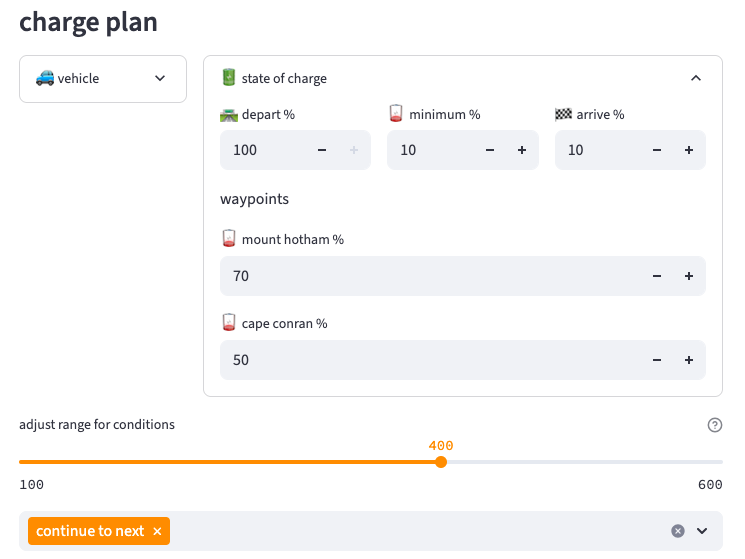
These waypoint SOC constraints are configured to match The Cross to The Cape weekend’s plan (like in the A-to-B trip in the contingencies demo).
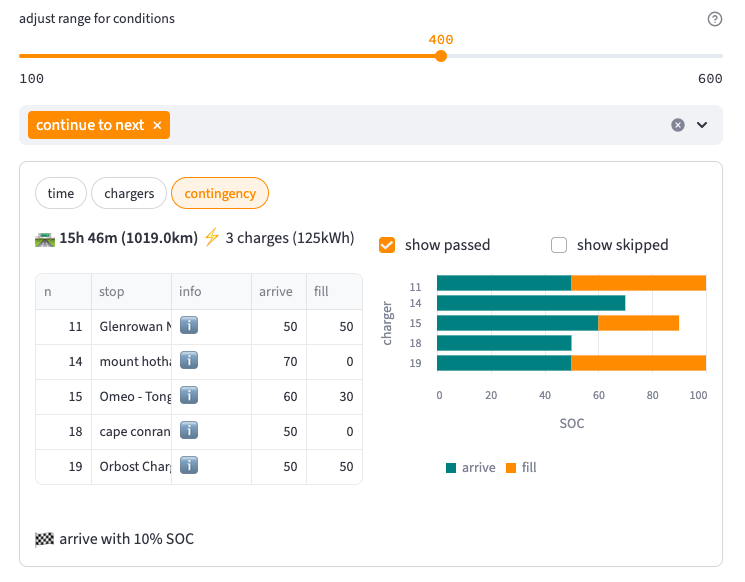
New plans
Now the adventure can be planned in one integrated whole!
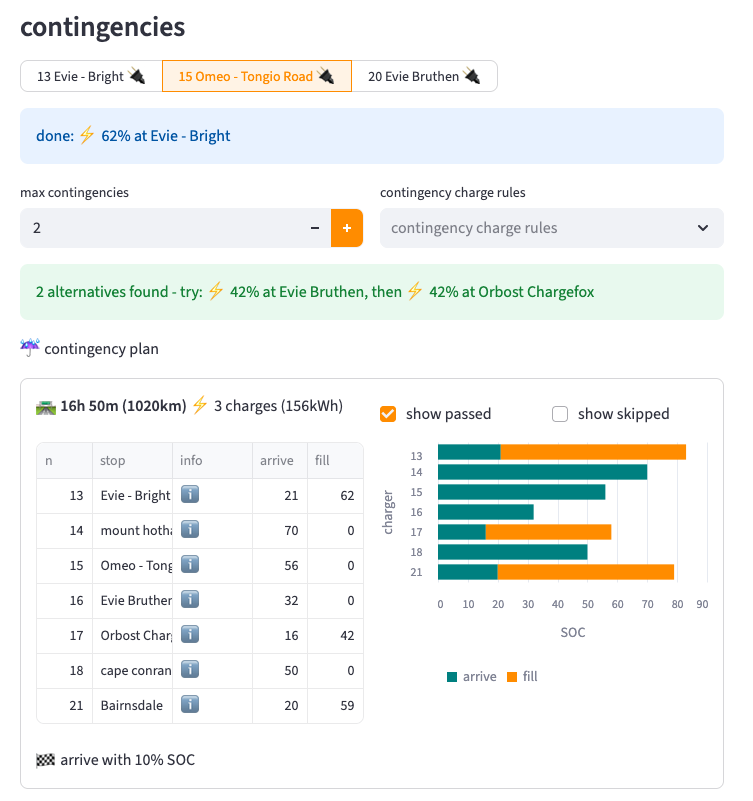
And this whole plan still caters for contingencies!
The generated directions are also updated with waypoints.
Next destination
There are still some tweaks and more features pending, like better UI, the ability to destination charge at waypoints, and auto-routing to Big Things. All the same, as this wet Melbourne morning dries up, I’m looking forward to using multiple destinations on some future adventures!
