
I was thrilled to be back for my second PyCon AU – with a wonderfully diverse and inclusive group of technologists – presenting on trippler in a talk titled An EV Trip Planner for Australia.

I got a great feedback, including a suggestion to incorporate the many very Australian BIG things we might encounter on road trips. As per the product framework I shared in the talk, the main question to resolve here is the viability of sourcing the data!
Watch the video of the talk in the 2025 PyCon AU playlist. Below I’ve also included the outline, drawn from existing electric vehicle posts.
Outline
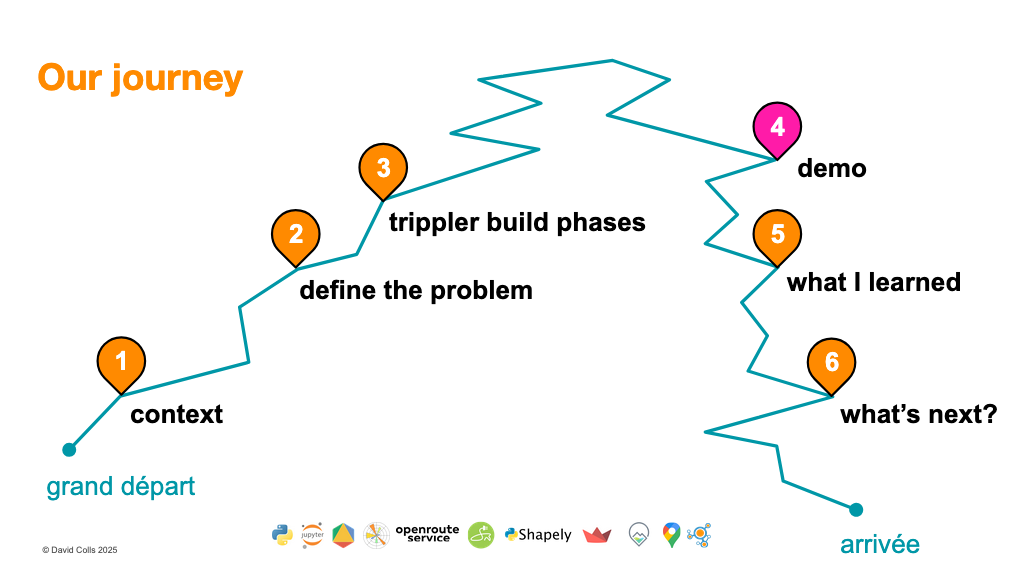
Context
- Sustainable transport and EVs, context for road trips
- It’s not range anxiety, it’s charger anxiety (unfortunately a thing)
- But charger anxiety is manageable with resilient planning tools
- Enter trippler
Define the problem
- Optimal plans assume one best plan, robust, accurate data, and perfect execution in an environment of abundance
- Resilient plans assume many good-enough plans, sensitive, messy data, and variable execution in an environment of scarcity
Trippler build phases
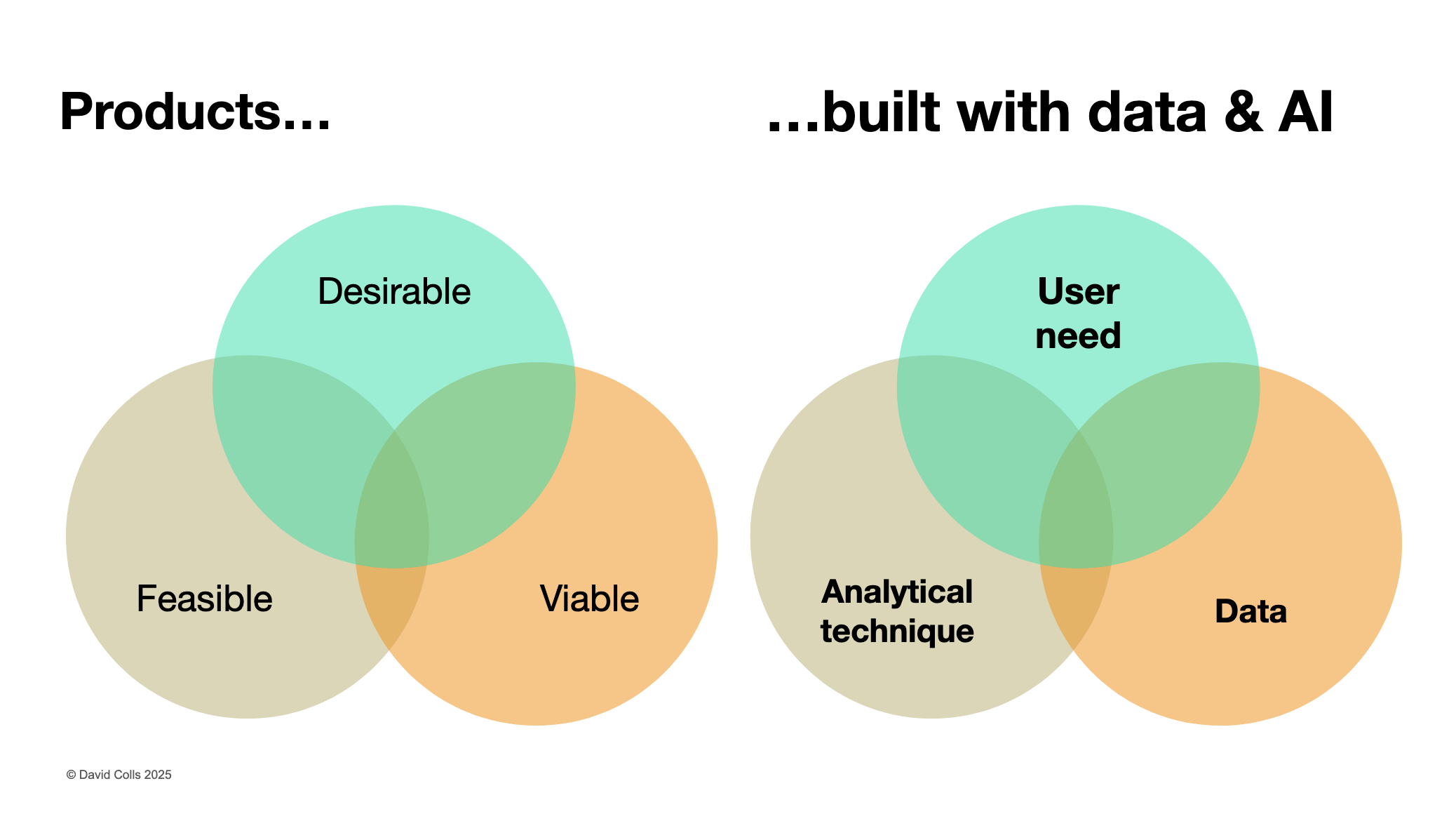
- Desirable, feasible, viable = user need, analytical technique, data curation
- Phased delivery to manage risk
- PoC analytical technique
- Riskiest Assumption Test data curation
- Prototype UX
- MVP for progressively expanded geographic regions
Demo
- Audience suggestion Melbourne to Warrnambool
(on “hard mode”! In a Nissan Leaf range 350km)
What I learned
- Things that were cactus and things that were apples
- Lots of amazing Python libraries and open services
What’s next?
- Incremental improvements (like charger hopping)
- And since the talk, contingencies and multi-destination
- Stoppler
- Future development options
- Related problems in transport electrification
- Network planning
- Fleet planning
- Or network resilience improves sufficiently … to make charger anxiety and trip planning redundant!