
Planning a dawn-to-dusk adventure from snow to surf in an electric vehicle meant not just planning for resilience, to allow for changes to the plan, but also planning for contingencies, to know in advance exactly how to respond to changes.
Carnival of carving
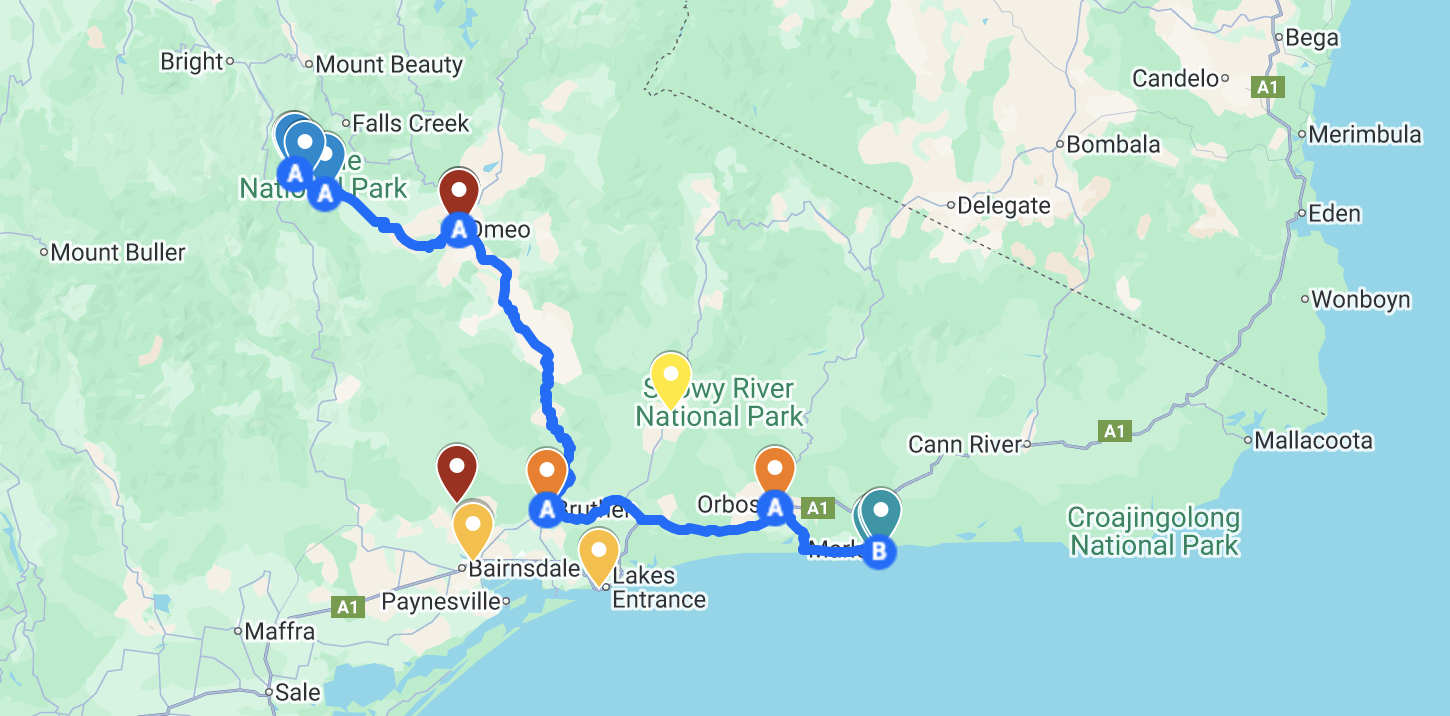
We lay our scene on the descent from Mount Hotham to Cape Conran, in eastern Victoria. We dubbed this adventure The Cross to The Cape Carnival of the Carve to complement 2004’s Bitchin Barrels to Baw Baw Board Bonanza.
Charge cascade
While the trip in an EV was “only” 250km (including 1800m descent), we couldn’t start full or finish empty, and as a result needed to charge about 40%. We planned the whole day in 30-minute blocks as we were racing the sunset from the moment the sun rose. As we could easily spend two precious blocks waiting for an occupied charger, how should we decide on the day whether to wait or move on to another charging option?
This charge cascade gave us all the options up front.
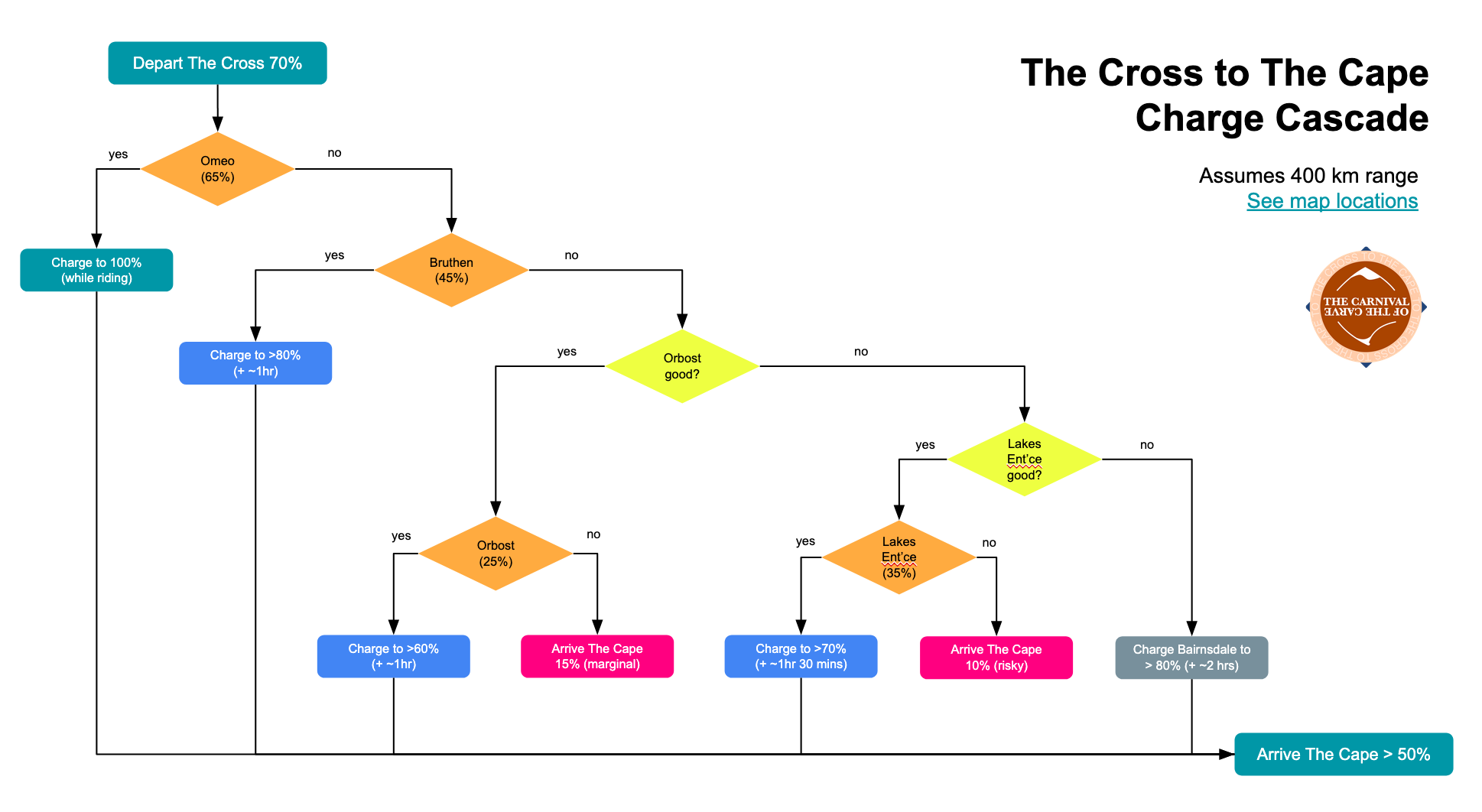
It also showed when we would have run out of charging options to get to the surf before sunset. After all this preparation, however, plan A worked out!

Manual calculation and diagramming was fine for one adventure, but for future road trips I wanted a similar contingency capability in trippler (which previously guaranteed resilience but didn’t provide specific contingencies).
Coding contingency
Thinking about the adventure experience, and various approaches to contingency planning in trippler, I arrived at two new features:
- Most contingency trip objective in addition to existing shortest time objective, and
- Contingencies explorer to see the results of multiple iterations of re-planning the trip when charging preferences are not available.
Together, these give us contingencies for chargers on a planned route.
Now we can see how we’d rebuild the charge cascade for The Cross to The Cape, but this time in trippler…
Configure the cascade
With further UI tweaks, we can configure the day’s planned driving in trippler:
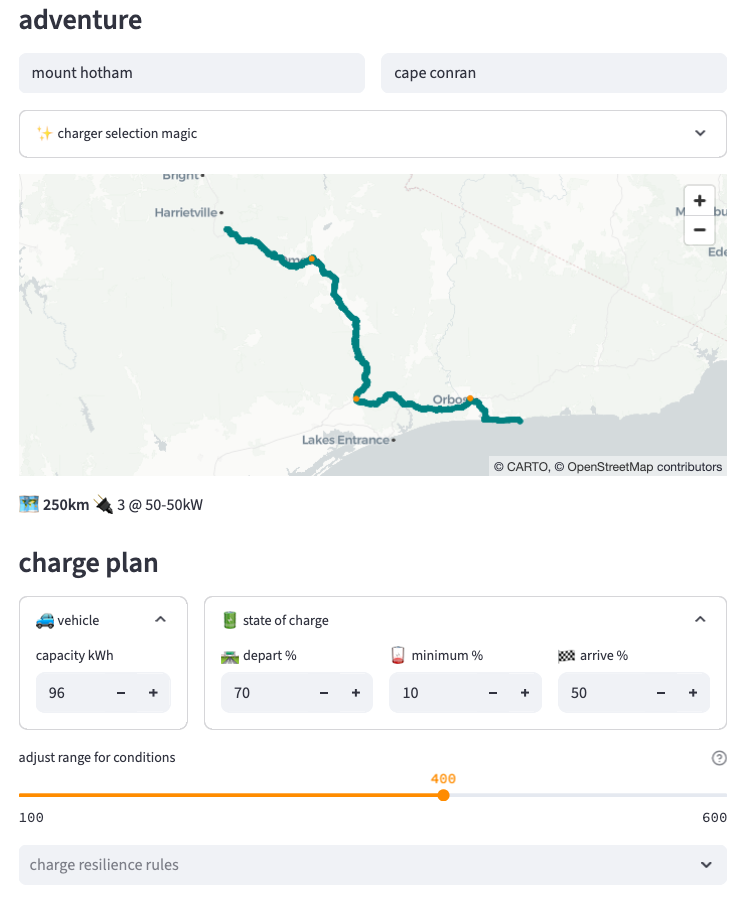
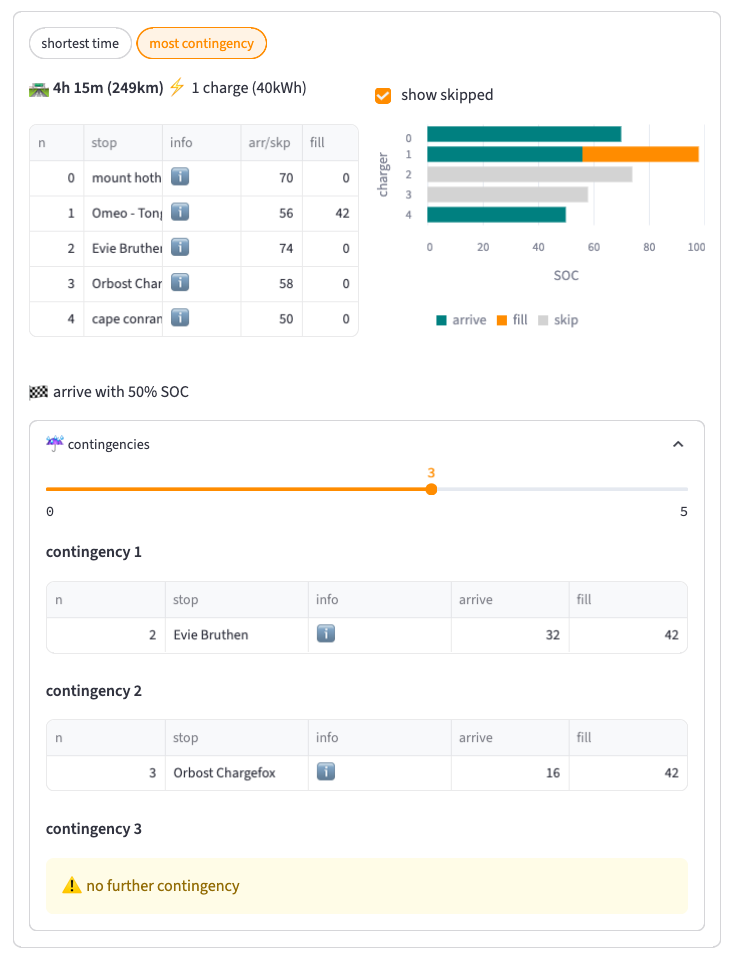
This shows 250km of driving from Mount Hotham to Cape Conran, with three 50kW chargers en-route at Omeo, Bruthen and Orbost. We plan to depart with 70% and arrive with 50% SOC. The vehicle’s range is 400km.
Most contingency
If we naively stuck with shortest time objective, as we see below, there’s a risk we’d skip past an available charger (eg Omeo) only to find the faster charge unavailable (eg Bruthen, deemed faster as marginally closer to the highway). Instead, most contingency objective picks chargers earlier on the route so we have, well, most contingency for unavailable chargers.
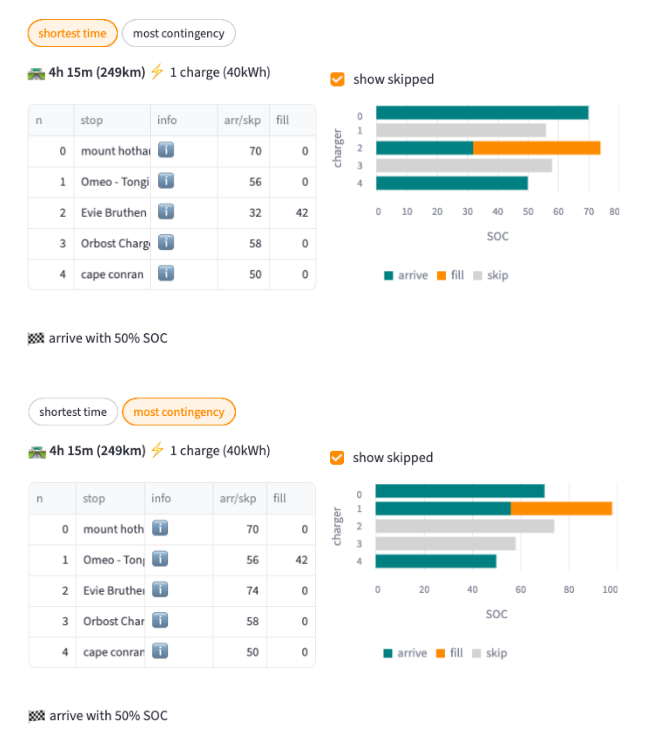
While the contingency objective penalises chargers later on the route, we continue to ensure enough charging to reach our destination, as the result remains subject to all of the other resilience constraints trippler plans can be configured to satisfy, a neat result requiring minimal changes!
Contingency explorer
With extra contingency, I’d now like know exactly what action to take should circumstances require a change of plan. The trippler contingency explorer provides plans B, C, and more, just like the charge cascade.
Contingency explorer MVP version
The contingency explorer reuses the existing planning solver for each contingency but excludes the unavailable chargers in each scenario. Also a pretty neat solution requiring minimal changes, and each contingency is in fact an entirely new plan!
Crushing constraints
The exclusion constraints require that unavailable chargers had previously been visited in the baseline plan order, but without any charging, while contingency plans may disregard previous no-backtracking constraints in order to provide more options.
Backtracking on the Cross to the Cape route could be all the way from Orbost to Omeo after finding first (shortest time) preference Bruthen offline, and then first contingency Orbost offline too. This covers most of the route three times and doubles the trip time, but still gets us to the destination while satisfying all constraints!
Corralling complexity
I’m still evolving the UX for backtracking, as for the contingency explorer overall. While contingencies in general are a cascading or branching set of options for each charging stop, we don’t necessarily want to expose all this complexity, as on the left below. A simpler version may be to show some number of alternatives per charging stop, as on the right.
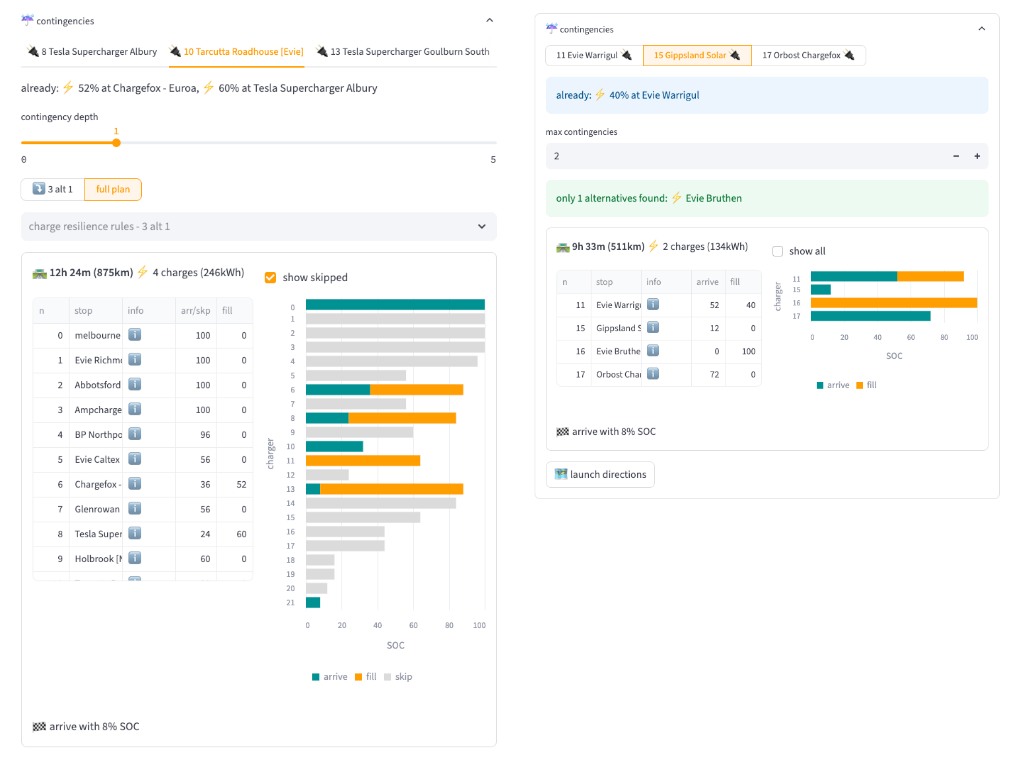
But after all this we can now explore up-front the specific contingencies that provide the resilience for this trip and many others in trippler!

The carnival is over
For now at least, as may be the snow season, but I look forward to carving out more time for outdoor adventure soon.
As an aside, I learned an interesting thing about driving an EV in snow this season. If an IC engine vehicle were snowed in and immobile, you would hear the engine rev as you pushed the accelerator to build torque (T) to drive out. In an EV, however, if all your instruments are power-based, you get no feedback from the vehicle while pressing the accelerator deeper and deeper until the wheels start moving. This is because power (P = Tw) is zero without motion (w), and in an EV it isn’t often the case that the wheels don’t start moving straight away! In this rare situation we’d need an electric potential or torque display for feedback. This may be a future OBD instrumentation project…
It was really satisfying to close out the carnival by coding the contingencies in the charge cascade in tripper. In addition to the improvements identified above, there are many more features waiting from here. Wherever it takes me, I am enjoying having my own resilient EV adventure trip planner but no firm roadmap!
